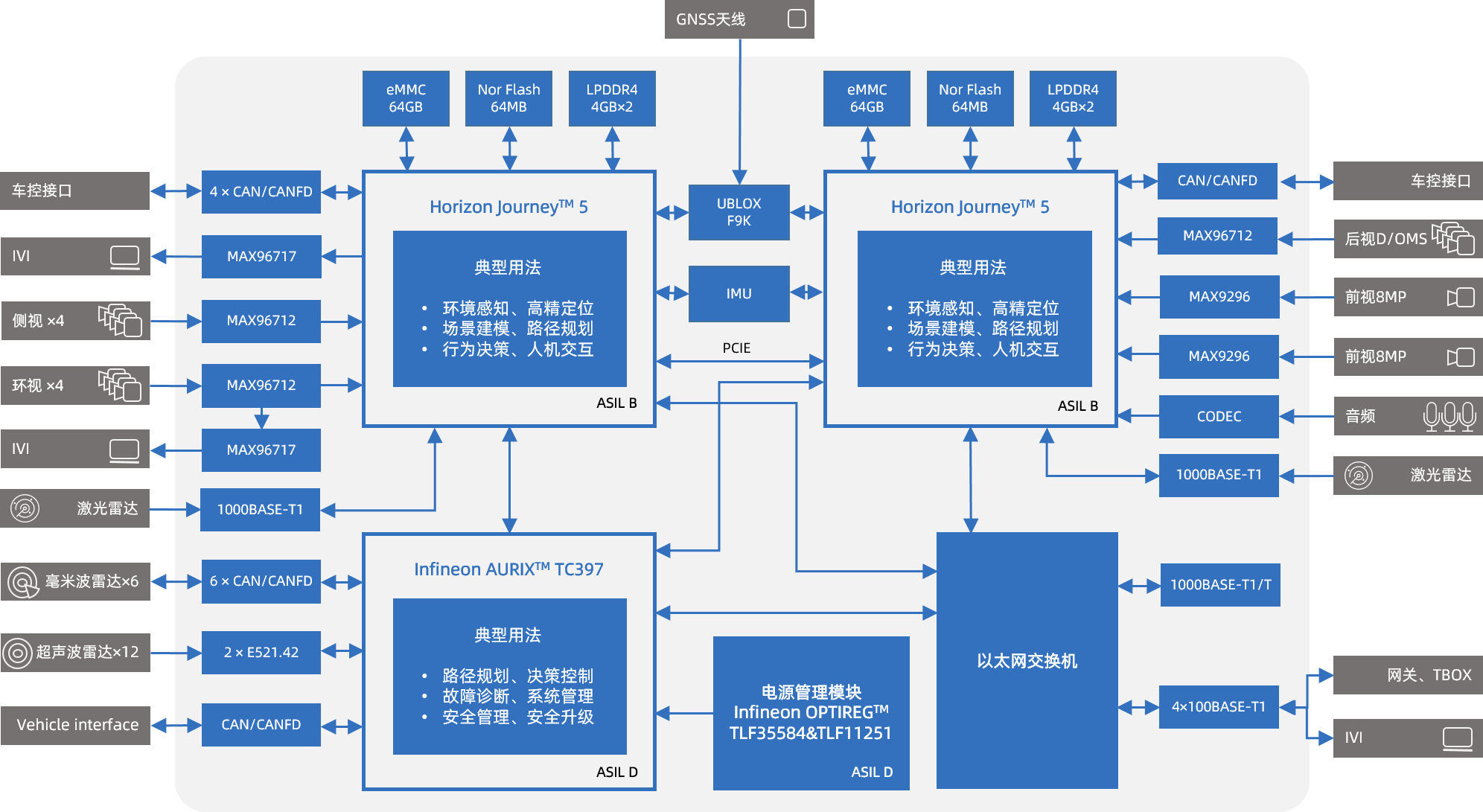
基于双征程5芯片为主计算单元的域控方案
")
")
英飞凌AURIX™ TC397, 6 × 32-bit TriCore @300MHz
2 × 地平线征程® 5,每颗SoC:
BPU: 双核BPU贝叶斯架构,AI算力达128TOPS
CPU: 8 × Arm® Cortex®-A55@1.2GHz
4 × 4GB LPDDR4, 4266Mbps
2 × 64GB eMMC
2 × 64MB NOR Flash
14 × GMSL2, 84Gb/s
2 × GMSL2, 12Gb/s,支持1路旁路输出,1路J5输出
F9K (GNSS)、IAM20685 (IMU)
1 × PPS输入
1 × PPS输出
4 × 100BASE-T1
3 × 1000BASE-T1 (其中1路可配置成1000BASE-T/RJ45)
12 × CAN FD:
TC397支持6路CAN FD收发和1路具有任意帧唤醒功能的CAN FD
J5A支持3路CAN FD收发和1路具有任意帧唤醒功能的CAN FD
J5B支持1路具有任意帧唤醒功能的CAN FD
1 × RJ45
1 × USB2.0, Micro B (J5A UART)
1 × USB2.0, Micro B (J5B UART)
1 × USB2.0, Micro B (TC397XP UART)
1 × JTAG (TC397XP)
1 × RS232 (J5A UART)
1 × RS232 (J5B UART)
2 × SD卡槽(高、低速卡可自适应)
DC 9~36V
<170.6μA
-40℃ ~ +85℃
-40℃ ~ +105℃
水冷 / 风冷
IP52
水冷:366mm x 219.5mm x 36mm
风冷:366mm x 219.5mm x 52.5mm
水冷:约2.53kg
风冷:约2.97kg
驾驶舱、后备箱
基于YOLOv5x的自动驾驶场景下的目标识别算法在GDCU35B控制器上的应用
算法功能:目标检测是自动驾驶技术的核心模块,检测算法部署时既要保证
算法精度损失小,也要保证算法运行速度足够快。
Demo展示了量化后的YOLOv5x模型在GDCU35B域控制器上的检测结果,
经过算法工具链优化,定点模型相比浮点模型精度损失在1个点左右,
征程®5芯片上模型运行FPS能够达到75左右,满足自动驾驶实时性要求。
技术文档


